Utilizing Pressure Sensors to Enhance Pneumatic Pressure Control in Robotics
By Carly Thompson, Marketing Communications Specialist, Merit Sensor Systems
In the era of increased automation and Industry 4.0 advancements, robots are evolving to become more intelligent and adaptable (1). As automation progresses, smarter robots are those equipped with advanced sensors that seamlessly integrate with data analysis and feedback systems.
Among the diverse array of robots in the industry, robotic arms stand out as one of the most common and versatile types. These arms perform various tasks, from lifting and relocating objects to executing intricate manufacturing operations.
Robotic arms, being articulated mechanisms, can be meticulously designed with a versatile range of motion tailored to their designated tasks, enabling them to execute a wide array of movements.
The efficiency gains brought by robotic arms are substantial, given their capability to move at significantly higher speeds compared to human counterparts. Moreover, they consistently maintain high precision during repetitive tasks intrinsic to manufacturing processes. For certain functions, programming a robot arm suffices to carry out the desired task.
However, in scenarios where robotic arms collaborate with machine vision or more advanced automation, they need to respond to and comprehend changes in their surrounding environment. This necessitates a mechanism that enables the robot to react dynamically, rather than being constrained by pre-programmed parameters. Pressure sensors come to the forefront as an invaluable solution.
Recent advancements in transducer-based sensors have paved the way for the creation of intricate robotic hands with sophisticated capabilities, particularly in handling delicate objects (2). The data from these sensors is relayed to actuators, ensuring that excessive force is avoided.
Pressure transducers play a pivotal role in achieving complex and precise motions, demanding the integration of an increasing number of sensors. In the case of highly articulated robotic hands or arms, a comprehensive suite of sensors becomes indispensable, with factors such as sensor size becoming critical for optimal performance.
As motion complexity increases, the precision and accuracy of these sensors become paramount, especially when they contribute to feedback systems that dictate the robot’s behavior.
 Any malfunctioning sensor within the network can lead to erroneous robotic movements, potentially causing disruptions or even physical damage to the robot’s articulated components.
Any malfunctioning sensor within the network can lead to erroneous robotic movements, potentially causing disruptions or even physical damage to the robot’s articulated components.
In conjunction with the heightened automation and data utilization in manufacturing processes, Industry 4.0’s trajectory places greater emphasis on sustainability.
Mobile robot arms are expected to minimize power consumption to extend operational lifespans between charges. Efficient sensor power management not only reduces operational costs but also contributes to reduced energy waste.
Among the fundamental tasks of a robotic arm is object manipulation, including picking up delicate items. Pneumatic actuators, which convert the energy in compressed air into motion, form the bedrock of various mobile robots. Ensuring the right amount of force is exerted on an object involves precise control of the compressed air pressure supplied to the actuator. In vacuum applications, this is typically achieved by monitoring the vacuum pressure within the evacuated region, where pressure sensors play a pivotal role.
Beyond the initial force required to grasp an object using the actuator, pressure sensors continuously monitor the vacuum pressure during the holding phase to ensure a consistent force is maintained.
Pressure sensors embedded in pneumatic actuators must exhibit rapid response times to sudden pressure changes, especially in robots requiring swift physical motions. These sensors also need to be highly sensitive and capable of measuring within the vacuum pressure range.
The significance of pressure sensors in robotic arms is evident when developing robots capable of dynamically responding to a wider spectrum of sophisticated tasks. The challenge lies in selecting the appropriate pressure sensor for the specific task at hand.
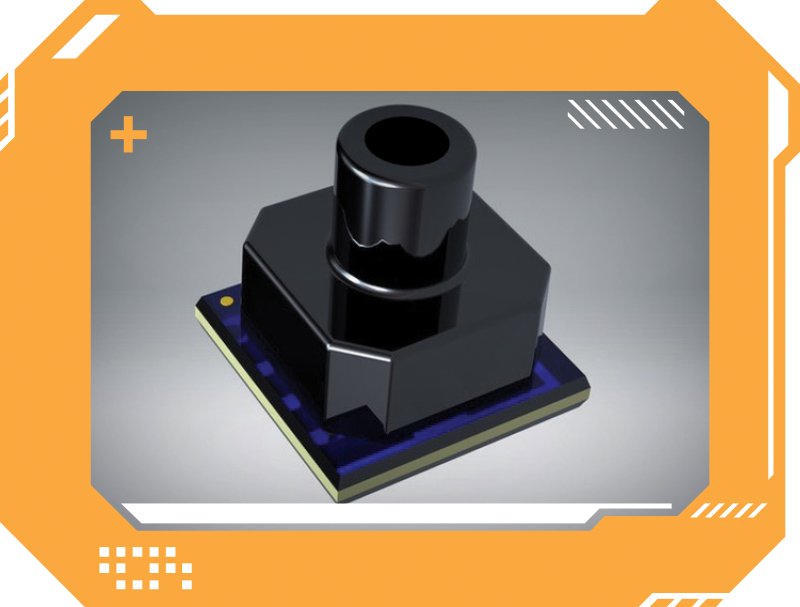
Merit Sensors, a trailblazer in MEMS piezoresistive pressure sensor development, offers an array of compact, low-power sensors, including their CMS Series tailored for smart robotics.
Built upon a piezoresistive pressure sensor augmented with an ASIC for thermal and non-linearity calibration, the CMS Series excels as a fully compensated pressure sensor package.
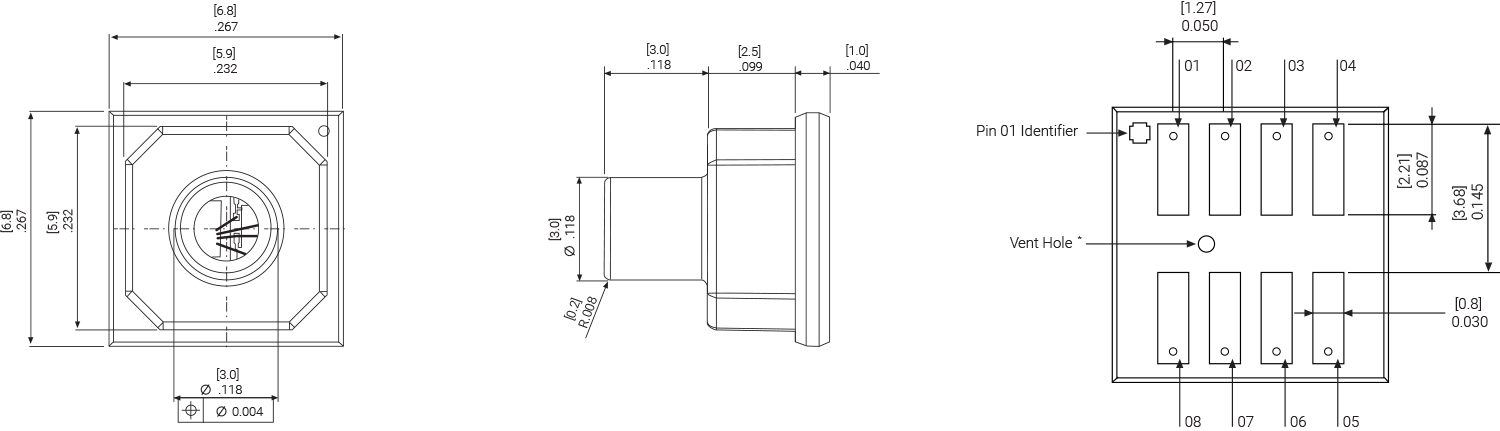
Boasting a footprint of a mere 6.8 mm x 6.8 mm (0.27” x 0.27”), these compact sensors seamlessly integrate into pneumatic robot systems, enabling the incorporation of multiple sensors.
The sensors facilitate easy integration into smart feedback systems via digital I2C and SPI output options, contributing to the creation of responsive robotics. Moreover, the ability to generate other I2C addresses upon request enhances versatility.
The incorporation of Sentium® technology empowers the Series to thrive across a broad compensated temperature range: [(0 to 50 °C or -15 to 85 °C) (32° to 122° F or 5° to 185° F)] while maintaining unparalleled stability.
With an expansive operating pressure range of 14 kPa to 1035 kPa (2 to 150 psi), complemented by burst pressures up to 100 times the maximum operating pressure, the Series caters to a diverse array of pneumatic robotic applications.
Options such as absolute and gauge variations, along with autozero and output averaging functions, further amplify the ease of integration and usability of these sensors.
These sensors feature SMD solder pads with a 1.27 mm (0.05”) standard spacing for electrical connections, accommodating a 2.7 to 5.5 V supply voltage range. Low-power operation modes optimize energy efficiency.
All products adhere to RoHS compliance standards. The sensors’ reliability and accuracy are underpinned by a piezoresistive Wheatstone bridge that anodically bonds the glass to a chemically etched silicon diaphragm.
(1) Sartal, A., Bellas, R., Mejías, A. M., & García-Collado, A. (2020). The sustainable manufacturing concept, evolution and opportunities within Industry 4.0: A literature review. Advances in Mechanical Engineering, 12(5). https://doi.org/10.1177/1687814020925232
(2) Girão, P. S., Ramos, P. M. P., Postolache, O., & Miguel Dias Pereira, J. (2013). Tactile sensors for robotic applications. Measurement: Journal of the International Measurement Confederation, 46(3), pp. 1257–1271. https://doi.org/10.1016/j.measurement.2012.11.015
Share this information.
Related Posts

Sponsor

Sponsors