Non-Contact Transport Delicately Handles Chocolate-Coated Cookies

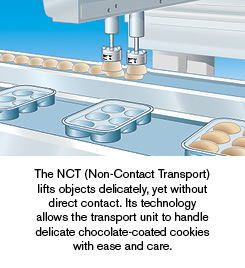
“Handle with care” is a paramount demand for a variety of products. At the same time, sensitive objects such as cookies, plastics, paper, or electronic parts are not spared from efforts to increase cycle times and throughput levels. For applications that rule out the use of grippers or vacuum technology, the non-contact transport system NCT from AVENTICS takes on these difficult handling tasks. A new version in polyether ether ketone (PEEK) permits direct contact with food products, such as in handling chocolate-coated cookies.
 Workpieces with porous, permeable, rough, or soft surfaces all have something in common: they’re hard to handle. Grippers can leave pressure marks on sensitive parts such as circuit boards. On workpieces with soiled surfaces, vacuum technology picks up more dirt than product. When gripping and suction fail to meet crucial handling criteria, the non-contact transport provides a safe, efficient solution.
Workpieces with porous, permeable, rough, or soft surfaces all have something in common: they’re hard to handle. Grippers can leave pressure marks on sensitive parts such as circuit boards. On workpieces with soiled surfaces, vacuum technology picks up more dirt than product. When gripping and suction fail to meet crucial handling criteria, the non-contact transport provides a safe, efficient solution.
A Physical Law for “Floating” Objects
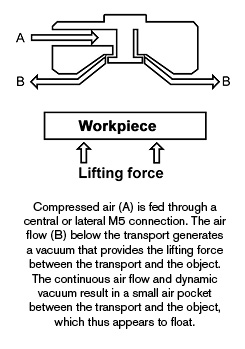
The transport lifts objects without touching them according to the Bernoulli principle, which states that the pressure in a flowing fluid decreases as the flow rate increases. The total energy of a steady flow remains constant for the entire flow path. This means that an increased flow speed is always accompanied by a decrease in pressure. Thus, a pressure differential is generated that modern systems use for non-contact handling of delicate parts.
According to this principle, the airflow below the transport generates a vacuum that provides the lifting force between the lifting unit and object. The continuous airflow and dynamic vacuum result in a smaller air pocket between the transport and the object. Because there is no direct contact in this handling application, the workpiece appears to float. Unlike vacuum technology, the NCT does not leave any marks on the workpiece or suction off contaminants, making it suitable for sensitive parts. Various sizes (20, 30, 40, and 60-mm) diameter are available for different workpiece weights and sizes. The transport unit uses operating pressures between 1 and 7 bar (15 to 102 psi) and can lift objects weighing up to 1.0 kilograms (2.2 pounds). Multiple transports can be grouped together in assemblies to lift increased weights.
 The non-contact polyether ether ketone (PEEK) variant is made of semi-crystalline high-performance plastic, which is used in medical technology as a material for artificial intervertebral discs and kneecaps with strong chemical stability. It is therefore suitable for direct contact with foodstuffs, and its hygienic design complies with EC and FDA guidelines. This version makes both in-place cleaning (CIP) and sterilization processes (SIP) possible, as well as direct contact with silicon, used extensively in the semi-conductor industry.
The non-contact polyether ether ketone (PEEK) variant is made of semi-crystalline high-performance plastic, which is used in medical technology as a material for artificial intervertebral discs and kneecaps with strong chemical stability. It is therefore suitable for direct contact with foodstuffs, and its hygienic design complies with EC and FDA guidelines. This version makes both in-place cleaning (CIP) and sterilization processes (SIP) possible, as well as direct contact with silicon, used extensively in the semi-conductor industry.
Application Example: Kinematic Robotics
Automated handling systems are the primary domain of the non-contact transport, as shown by the example of Brähmig GmbH in Radeberg near Dresden, Germany, a manufacturer of special machines that use non-contact technology for handling wafers, charge air coolers, and felt shoe shoes. Brähmig equips its own parallel kinematic robot, BRÄHMIG DYNAMOTION with the NCT-PK. The transport takes the completely unsorted goods arriving on the belt, picks them up, swivels them to the side, and places them precisely into their packaging.
 According to Sandro Claus, responsible for sales and marketing at Brähmig, “We need to make sure that the chocolate coating on the pastry is not damaged by pressure points or scratches. Vacuum was eliminated as an alternative since we could not constantly exchange the filter elements.”
According to Sandro Claus, responsible for sales and marketing at Brähmig, “We need to make sure that the chocolate coating on the pastry is not damaged by pressure points or scratches. Vacuum was eliminated as an alternative since we could not constantly exchange the filter elements.”
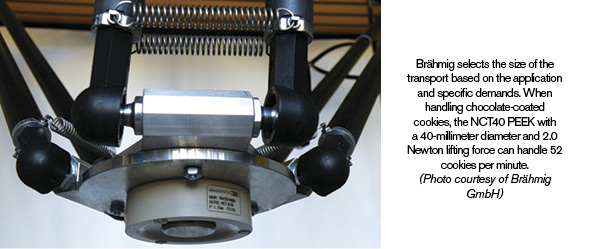
Claus explains that the robot achieves accelerations of 190 g and cycle times of 150 units per minute; however, cookies, and especially chocolate-coated pastries, require extremely gentle handling. Precisely picking up and depositing 52 cookies per minute is a very high throughput in the food industry, and among other aspects, speed is ultimately based on the quick switching of pneumatic valves at a defined point.
The transport is mounted at the operating point of the kinematic robot. After suctioning, the product is lifted 10 cm, moved 50 cm in a horizontal direction, and placed back down from its 10-cm elevation. Then the transport switches off. “Depending on the pastry or the individual application, we can select the sizes of the NCT so that its distribution of force is optimally suited to the product,” said Claus.
In its latest system, Brähmig uses three to four consecutive kinematic robots. The system increases production efficiency through short cycle times coupled with consistently high precision. In applications, such as handling chocolate-covered cookies, the manufacturer also experiences smooth automation of complex manual tasks. The system is suited for all types of highly flexible loading and repositioning processes for small parts in a wide range of industry sectors.
For more information, visit www.aventics.com or email info.us@aventics.com.
Share this information.
Related Posts

Eaton Drives Efficiency with Hybrid Lift Truck Technology Test Drive
QuickDesign Breaks the Time Barrier of Integrated Package Design
Then and Now—1994-2019: 25 Years of Innovation
Compressed Air Water Problems

Demystifying Chemical Compatibility of Seals and Fluids

The Role Of Robotics And Cylinders In The Fluid Power Industry
Sponsor

Sponsors