Ground Control: Electrohydraulic Precision in Mobile Machines

By Ben Dupre, Senior Technical Writer, HydraForce
Today’s construction, agriculture, and material-handling machines look very different from machines of 20 years ago – not only aesthetically and ergonomically, but also under the hood. While manufacturers are innovating better ways to provide a more comfortable and productive machine for their customers – such as higher quality seats, climate control, and reduced noise and vibration – they are also moving forward with greater integration of electronics and electrohydraulic systems. But while electronic controls enable today’s mobile machines to operate with more efficiency, safety, and autonomy, some systems still don’t deliver the response and predictable control of manual operation or piloted joysticks. What is needed are control systems that provide the efficiency and precision of electrohydraulics without sacrificing the responsive “feel” that operators desire. Let’s look at some of the issues and solutions.
Manual control. Straightforward manual hydraulic controls have long been used in construction machines. Using them requires a high degree of familiarity with the machine and its operating characteristics. The speed and quality of the work they can achieve depends much on the operator’s skill and finesse. When using manual hydraulic controls, the operator benefits from direct feedback and can adjust his or her approach to the work in real time.
Hydraulically piloted control. The development of smaller machines like skid-steer loaders, backhoes, and compact excavators drove a greater need for design flexibility, and hydraulically piloted control schemes became commonplace even in larger machines. With these types of controls, a lever or joystick and pilot valve in the cab operated the main control valve remotely by pilot pressure. Common complaints of the technology include:
- Poor accuracy and repeatability
- High hysteresis (commonly 10-25%)
- Inefficiency (due to pilot flow)
- Sluggishness in cold climates
These drawbacks can make the technology less than user friendly.
Electrohydraulic control. As controls evolved, electrohydraulic (EH) control was widely adopted because it solved some – but not all – of the performance issues associated with hydraulically piloted control and allowed more sophisticated control schemes. Moving the piloting element to the main control valve simplifies plumbing, reduces potential leak points, and increases both efficiency and responsiveness. EH control enables features like:
- Tuning/deadband compensation
- Control ramping
- Load compensation
- Electronic self-leveling
- Return-to-dig
- Electronic cylinder cushion
But while EH control gave machine designers much more flexibility, operators still lamented the loss of feedback and responsiveness. At the root are two factors:
• The multistage control chain (operator input/electronic
joystick/hydraulic pilot stage/main control spool). EH control relies on
electro-proportional pressure control valves to pilot the operation of a spool in a monoblock or stack-valve configuration. But,like a child’s game of telephone, this can introduce multiple layers of hysteresis and lag.
• The lack of position feedback to close the control loop. While EH control does typically close the loop on control current in the pilot stage, correcting the coil current only addresses one-third of the potential error in the system, leaving it still open to variation.
Servo-mechanical EH control
Building on the successes of EH control, HydraForce engineers set out to improve operator experience by tackling the responsiveness and repeatability issues still present in the technology. The solution is a closed loop control that is based on position feedback.
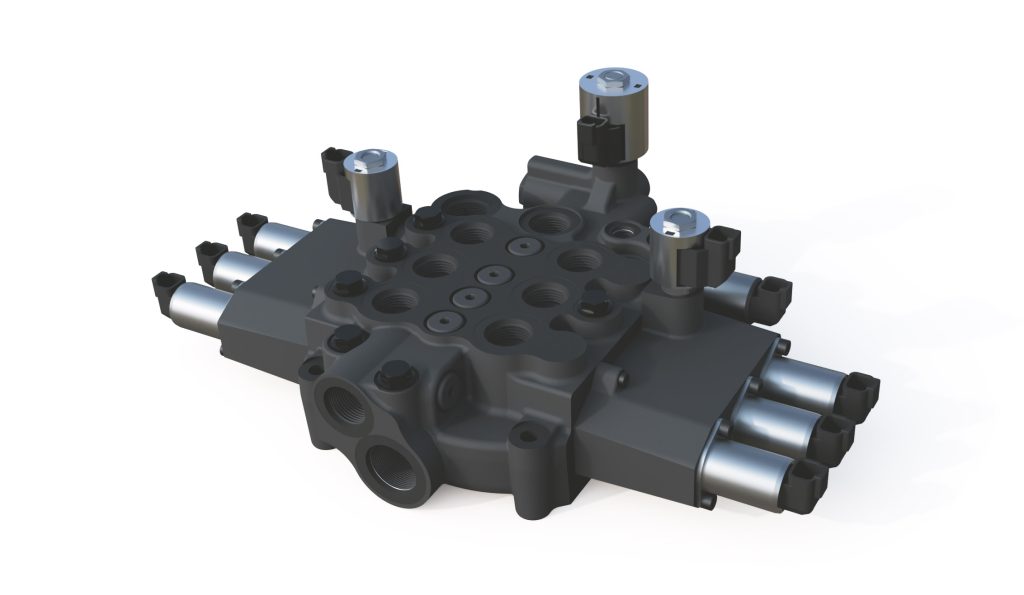
HydraForce’s new EHPV90-G33 ElectroHydraulic Pilot Valve enhances EH control with a unique mechanical feedback mechanism. Now, the main control spool is mechanically connected to the pilot element – just like the operator’s hand is connected directly to the control lever with manual control. The feedback spring communicates the spool position to the pilot element – virtually eliminating hysteresis and deadband. This configuration achieves flow-force correction of the piloted spool and allows both ends to remain pressurized – stiffening the system and improving stroke response. The result is a control system that is significantly more responsive and predictable across all operating environments and requires far less tuning from machine to machine. With hysteresis below 3% and response of 65 milliseconds, EHPV performs favorably even when compared to EH valves with LVDT position sensing.
The precision, response, and accuracy of a servo-mechanical control system makes it ideal for applications with quickly changing commands, such as automated (requiring a degree of operator intervention) and autonomous machines.
Repetitive motion such as boom-raise-and-lower, leveling of forks and buckets, and bucket shaking – all of which typically require the attention of a skilled operator – can be automated. With a reliable servo-
mechanical control, functions such as return-to-dig, auto level, and electronic cylinder cushion can also easily be programmed.
System integration
To take things even further, telematics and remote access can be integrated into the system architecture, allowing functions to be engaged or disengaged remotely. Connected devices could allow equipment dealers to keep less inventory and give them the flexibility to upsell advanced functions without changing hardware.
 Operational parameters can be adjusted for safer job sites such as load limiting, limiting elevation while loaded, and even slowing the vehicle speed when approaching obstacles in the worksite. Vehicle performance can be adjusted to match the experience level of the operator (novice or expert mode), potentially expanding the market for these machines, as more operators at various levels of experience feel more comfortable maneuvering the machine.
Operational parameters can be adjusted for safer job sites such as load limiting, limiting elevation while loaded, and even slowing the vehicle speed when approaching obstacles in the worksite. Vehicle performance can be adjusted to match the experience level of the operator (novice or expert mode), potentially expanding the market for these machines, as more operators at various levels of experience feel more comfortable maneuvering the machine.
Of course, with the integrated telematics, data can be collected remotely and used to improve equipment maintenance, and technicians can diagnose problems and suggest solutions, many times without having to make a trip to the job site.
HydraForce has partnered with Epec Oy, of Finland, and Roquet Hydraulics, of Spain, to create this optimized servo-mechanical control system. The door is open for OEMs to step into a new world of machine performance and flexibility.
Share this information.
Related Posts



Sponsor

Sponsors