Pneumatics Gets a Grip on Robotic Tooling Applications
By John Ross, Vice President of North America Sales, PHD Inc.
Most applications today incorporate both robotic and fluid power components. These two technologies produce the fastest return on investment (ROI) in today’s manufacturing marketplace. When considering robot applications, evaluate how to pick up the product using the robot. This is where many electrical and pneumatic actuators come into the design process.
have solved most types of end-of-arm tooling (EOAT) solutions you can think of on a robot. We use pneumatic grippers to keep the force and momentum high, while keeping the weight down. But this is just one way. Often, we create elaborate designs with pneumatic slides, rotaries, and cylinders. With more and more applications, we find that traditional grippers alone are not going to solve the problem. The mix of these various product families work like an erector set. With standard products, you can easily pull from the CAD library and start to layout the concept.
Nontraditional EOAT applications
There are instances when we are faced with picking up products from fixed positions when the products are randomly placed or spread out. These applications are opportunities to solve problems for the customer. In these cases, it is important to understand the product and process flow prior to choosing the actuators. Many times, the product pieces will be in lanes with set positions. To get the best ROI, we want to pick up as many pieces as possible per cycle. Here are a few examples of these nontraditional types of EOAT applications.
When picking up multiple pieces of the product each cycle, it is typical to then place them at different spacing. We refer to the device that does this as a pitch-change actuator. Visualize medical vials that must be picked up from lanes and placed with different spacing into a tray. This is where a pitch change must occur. Most of these actuators are designed per application. These special pick heads are designed and built to the customer requirements by PHD’s Unlimited department.
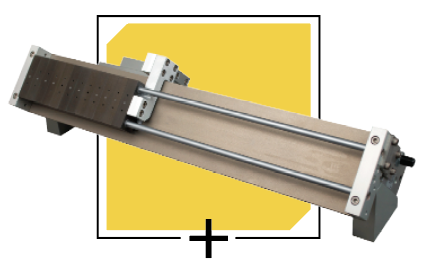
In this example the requirement was to pick up six vials at a time from lanes with 4-millimeter center spacing and then place them into the tray at 8-millimeter center spacing. This would require an actuator that can house six horizontal saddles, each with a mounted pneumatic gripper. The technology used on short pitch change will vary from that of a larger pitch change. We would use an existing slide extrusion to house the pitch-change saddles. Once this is completed, we would mount a gripper onto the saddle, the best gripper and tooling to fulfill the weight and force requirements to grip the vials effectively.
Communication between the customer and PHD is important at all stages of the design process, particularly when determining space and weight constraints.
Pitch-change applications
The technologies used vary depending on the pitch-change requirements. Some use piston-stroke variations, while another may be a cam or mechanical linkage change. Larger pitch changes require a different style of actuator similar to an accordion design. This type uses linkages between the saddle as the pneumatic cylinder extends. The linkages act as a hard stop for each saddle position until the accordion is 100% open.
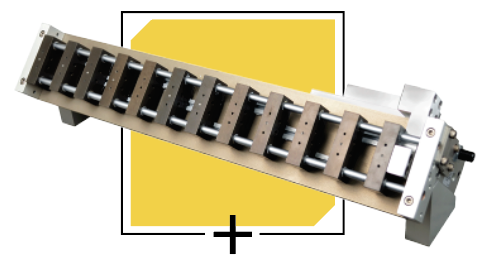
Two examples of pitch-change applications PHD has done in the past are golf-ball packaging, in which the balls were picked up and placed into a sleeve, and the loading of medical vials into trays for automated testing. There are applications that require multiple pitches out of the same actuator. These are typically done with a variable pick head. This would be done with belts and a motor for controlling positions, providing near-zero change-over times between the different product sizes and spacing. These are more complex and higher-priced units, but the payback is there for both the pneumatic and electrical designs.
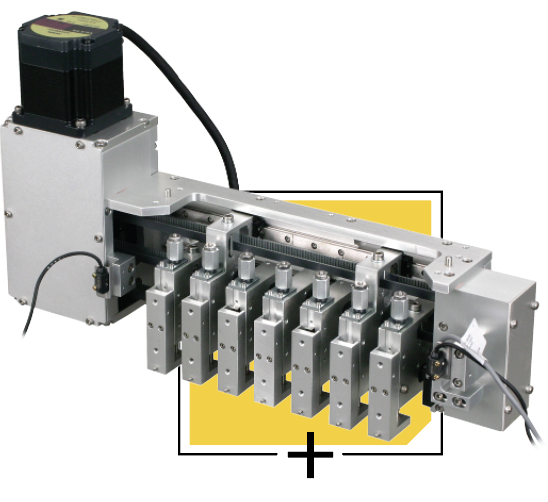
Another common application requires picking up several parts at once but placing one part at a time. This is done to reduce the steps the robot takes between the part-picking area and the part placement, increasing the robot’s output. Typically, one part is picked up and delivered to its end location. Picking up multiple pieces at once and placing each at a different location substantially reduces cycle time.
This device creates better ROIs for the entire robot cell. The primary angular motion is done by known angular gripper-cam technology. The part is picked up, then the cam motion rotates it 90 degrees. Imagine the gripper fingers at 12 o’clock with the gripper fingers straight up, then the cam moves the finger to 3 o’clock with the fingers facing out. Now you can place eight parts before cycling back to reload from the part pickup location.
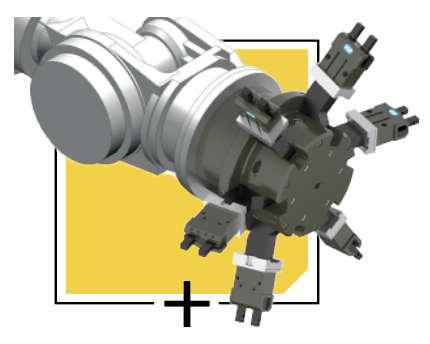
In the last example, two grippers are mounted to the robot head opposing each other at 45-degree angles from the vertical center. This configuration is ideal for load-unload applications. The last thing you want is to spend a lot of time loading and unloading. Picture a CNC lathe loading application in which a part has just finished being machined. Gripper A removes the finished part from the CNC chuck, then the robot head rotates gripper B to place the new blank part into the chuck for machining. This maximizes the CNC machine run time each day. The process is optimized. When the CNC door opens, the finished part needs to be removed and the new one placed as fast as possible. PHD has done this type of solution for years.
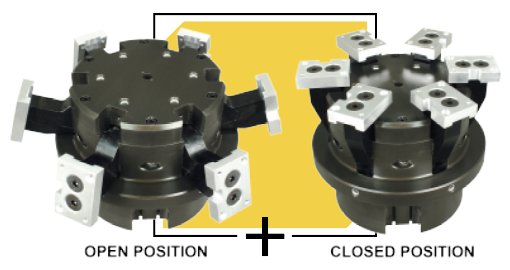
Two- and three-jaw designs
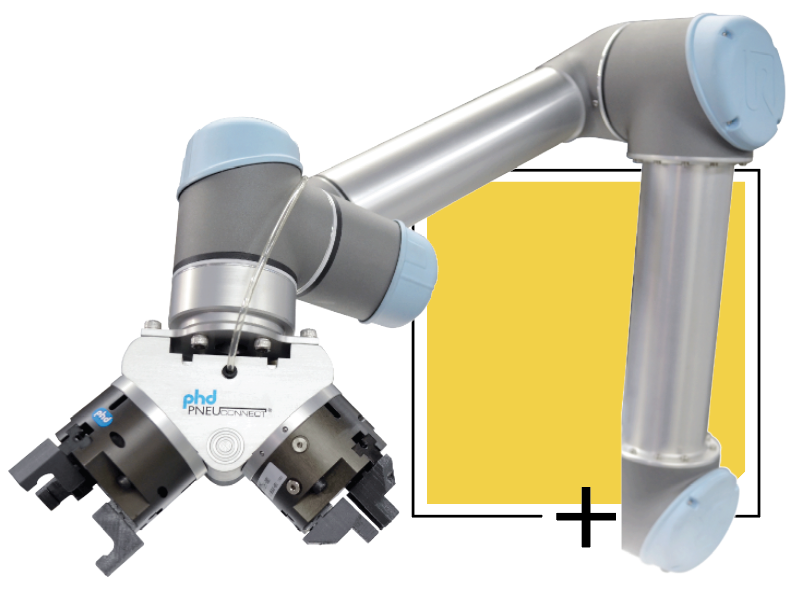
Recently, PHD’s Pneu-Connect product family was developed as standard end effector packages. This allows for two- and three-jaw designs. It also allows for a combination of one two-jaw and one three-jaw in the same package. These Pneu-Connect packages are used frequently in the collaborative robot space. The Pneu-Connect package incorporates a control board to communicate to the robot along with built-in valves and switches for each gripper. This is a plug-and-play device. Bolt up to the robot head, connect the cable for communication to the robot, and you are off to the programming stage. One additional feature in the package is the free-drive button, which allows you to press the button on the Pneu-Connect package and move the robot around by hand. This option is not available for all robots.
As more of PHD’s products are used in the robot space, we will continue to develop new ones for the robot market. As industry continues into the automation boom, as I have heard it called, we will be ready for the new challenges the robot market presents.
Share this information.
Related Posts
Transforming Our Thinking: What in the World is a VDT?

Winds of Change: Hydraulic Turbines Generate Green Energy
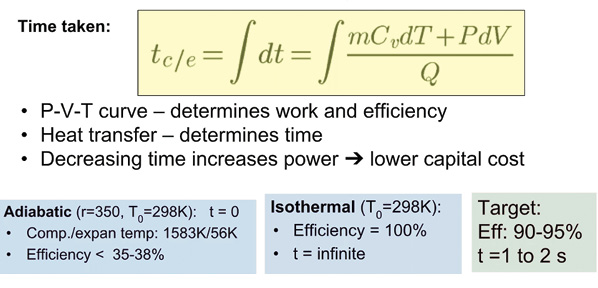
Developing a Liquid Piston Gas Compressor/Expander for CAES and CO2 Sequestration

One for the Road: Providing Power on Demand
New High-Precision Single Stroke Honing Process

Counter Balance Valves: Part 2
Sponsor

Sponsors